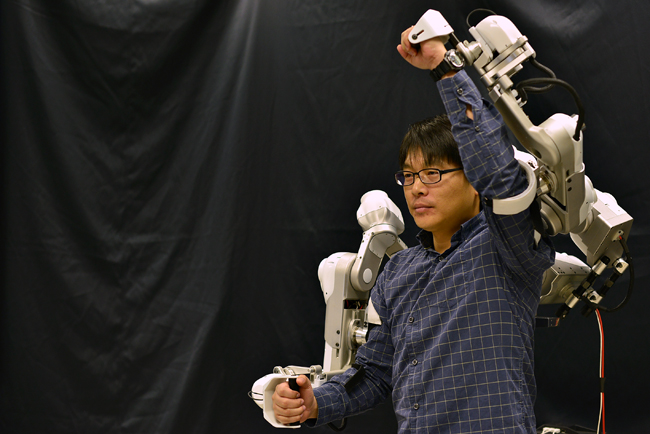
UT researchers have developed a robot exoskeleton that could help provide helpful therapy to patients who have spinal and neurological injuries.
The robot, HARMONY, connects to patients at six places on the upper body, unlike other robotic technologies for physical therapy that only focus on one arm or part of the upper body. This could help patients perform daily activities with two hands, according to Bongsu Kim, mechanical engineering grad student and lead designer of the robot.
“[We designed] the robot’s skeletal structure such that its mobility matches with that of the human body … securing a wide range of motion to support most activities of daily living,” Kim said.
Although the robot covers the entire upper body, HARMONY feels weightless to patients — a trait researchers in the ReNeu Robotics Lab, a lab in the mechanical engineering department that works with rehabilitation and neuromuscular robotics, considered when designing the exoskeleton.
The robot includes sensors that are able to collect data at 2,000 times per second. The sensors provide physical therapists and doctors with real-time data, allowing them to adjust treatments according to the data HARMONY provides.
“The data includes patient’s hand position, the configuration of the arm, velocity of movement, the amount of force provided by the robot and the amount of force that a subject applies,” Kim said.
Kim said he believes the robot could reduce patients’ recovery time because it can adapt to patients’ activity.
“The control algorithm will automatically detect the performance of the patient movement and provide assistance only at the moment when the patient is not able to process his or her [own] movement,” Kim said.
Mechanical engineering senior James Debacker said he worked extensively on prototypes of HARMONY while interning at ReNeu during the summer of his sophomore year.
“I helped Bongsu Kim in several aspects of the project, including mechanical design; manufacturing and assembly; electrical wiring and basic circuit design; sensor choice and integration; and robot control,” DeBacker said.
Mechanical engineering junior Neel Bhatt said extensive work at the lab has assisted him in determining his future goals.
“[The lab] has solidified my understanding on robotic mechanical systems, which is very valuable for graduate school,” Bhatt said. “The lab has helped me develop a stronger grasp in programming and, most importantly, on how research in general is initiated and performed.”
According to Kim, the next step for the ReNeu Lab is to develop control algorithms that capture the way humans learn their motor skills in order to maximize HARMONY’s effect on patient rehabilitation.