Today’s robots are not known to be the masters of balance. This issue not only affects research advancement, but it also poses safety risks to humans, according to UT researchers.
Luis Sentis, the director of the Human Centered Robotics Lab (HCRL) at UT, is working on Project Mercury, a robot designed to demonstrate enhanced stability and balance capabilities.
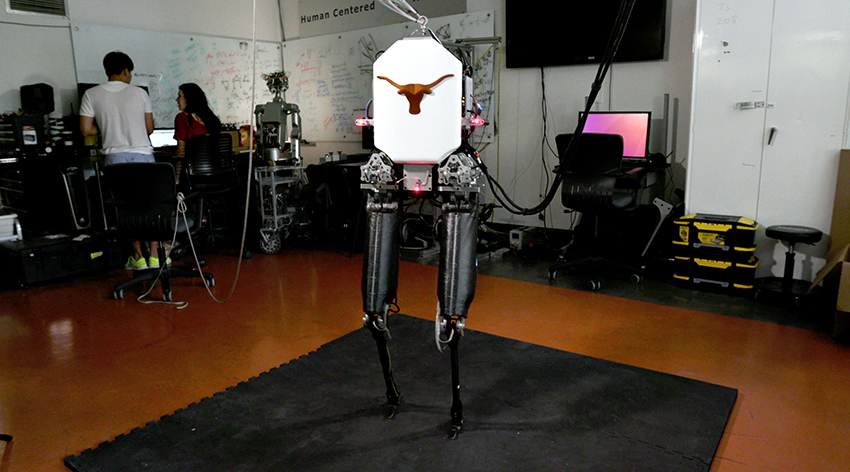
Project Mercury, the lab’s most recent robot, is a biped, meaning it stands and moves on two legs, making it more human-like. Sentis said developing safer, more stable robots is important for the future.
“In the future, robots will not only be inside buildings but also out in public places,” Sentis said. “We explore humanoids and wheeled robots that can come in contact with humans and remain balanced. We also explore ways that these robots can maneuver in an effort to avoid contact.”
Donghyun Kim, a postdoctoral scientist in the lab, said that Project Mercury’s legs are designed to resemble the anatomy of a human knee. Mercury has actuators in its knees and hips, which are devices that produce a certain motion based off a specified signal.
The actuators in its legs act as human joints and allow the robot to have soft movement capabilities, such as lightly grasping, bending or stepping, said Gray Thomas, a mechanical engineering graduate student in the lab.
“Actuator control hides friction from the gears and mechanics inside the robot, allowing for smooth movements,” Thomas said.
According to Kim, there are no actuators in its ankles, which means its feet are permanently fixed, but it enhances dynamic motion.
Dynamic motion refers to quick movements such as stepping or running, and while Project Mercury does not run, it does take continuous steps. As a result, Project Mercury steps like it’s on its tip-toes.
Because of this design, Project Mercury, which is continuously stepping in place, doesn’t fall over when hit by an object. It can absorb the contact, balance itself and then step back into its original position.
“(Project) Mercury would make humans feel safer around robots as its technologies reduce our fear of robots just falling down,” Kim said.
HCRL is not the first lab to succeed in developing a robot which can move without ankle actuation, Kim added. But according to Thomas, Project Mercury has important implications for the future of bipedal robots.
“(Project) Mercury demonstrates the levels of safety with which a robot can operate within a human environment,” Thomas said.
Their work may pave the way for human prostheses in the future as well, even if it isn’t a primary research goal, according to Thomas.
“The actuator control and soft movement capabilities explored in the robot have applications in developing artificial limbs and exoskeletons for humans,” Thomas said.
Building on knowledge gained from Project Mercury, HCRL is developing a new robot named DRACO Dynamic Avatar, according to Kim.
“DRACO will have increased degrees of freedom in the legs and feature greater power and control [than Project Mercury],” Kim said. “We also want to target increased dynamic behavior such as running and jumping.”
Kim added that DRACO Dynamic Avatar will enable the researchers to further explore safety, stability and movement for future robots.

















